Búsqueda local guiada (GLS) es una alternativa a búsqueda local para hacerla más efectiva.
La idea básica de GLS es aumentar la función objetivo con penalizaciones.
Dada una función objetivo ![]() que mapea una solución candidata
que mapea una solución candidata ![]() a
un valor numérico, GLS define una función
a
un valor numérico, GLS define una función ![]() (que reemplaza a
(que reemplaza a ![]() )
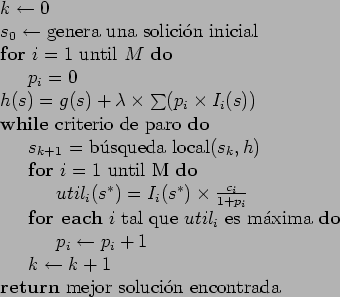
y que es usada por búsqueda local de la siguiente forma:
)
y que es usada por búsqueda local de la siguiente forma:

Para que búsqueda local pueda salir de óptimos locales, GLS añade penalizaciones a ciertos atributos.
La utilidad de penalizar un atributo ![]() dado un óptimo local
dado un óptimo local ![]() es:
es:
donde ![]() es el costo del atributo y
es el costo del atributo y ![]() es la penalización
actual del atributo
es la penalización
actual del atributo ![]() .
.
El atributo de mayor utilidad es el penalizado (se incrementa su penalización actual).
Veamos primero como prodría aplicarse al TSP antes de ver algunas variantes.