IMAV 2016 final results in PDF
Photos
You can find photos about the team, demos, events and drones.
First place prize of the Mexican Robotics Tournament 2017

Second place prize of the IMAV 2016

Our drones
Our team has several drones of different sizes which the most used is the drone Bebop 2 of the Parrot company, for its reliability and how stable it is at the time of entering in flight. We also have drones that have a good control as is the matrice 100 of DJI company.
Drones with which the team works
 Ar. Drone 2.0, Parrot
Ar. Drone 2.0, Parrot Drone Bebop 1, Parrot
Drone Bebop 1, Parrot Drone Bebop 2, Parrot
Drone Bebop 2, Parrot Disco FPV, Parrot
Disco FPV, Parrot Drone SOLO, 3DR
Drone SOLO, 3DR Matrice-100, DJI
Matrice-100, DJIDemos & Events
Our team is invited to several events in which we participate giving demonstrations, presentations, tutorials in schools, most of what we present in the events consists of work done in advance, work being done and future work, in some of these Events are given demonstrations of what we talk about. Within the team you have to demonstrate some demonstrations either outside or inside the institute, these demonstrations are important as they consist of what is being worked on, most of the demonstrations are performed when the work has a progress of what is this Developing or when it has been completed.
Demos
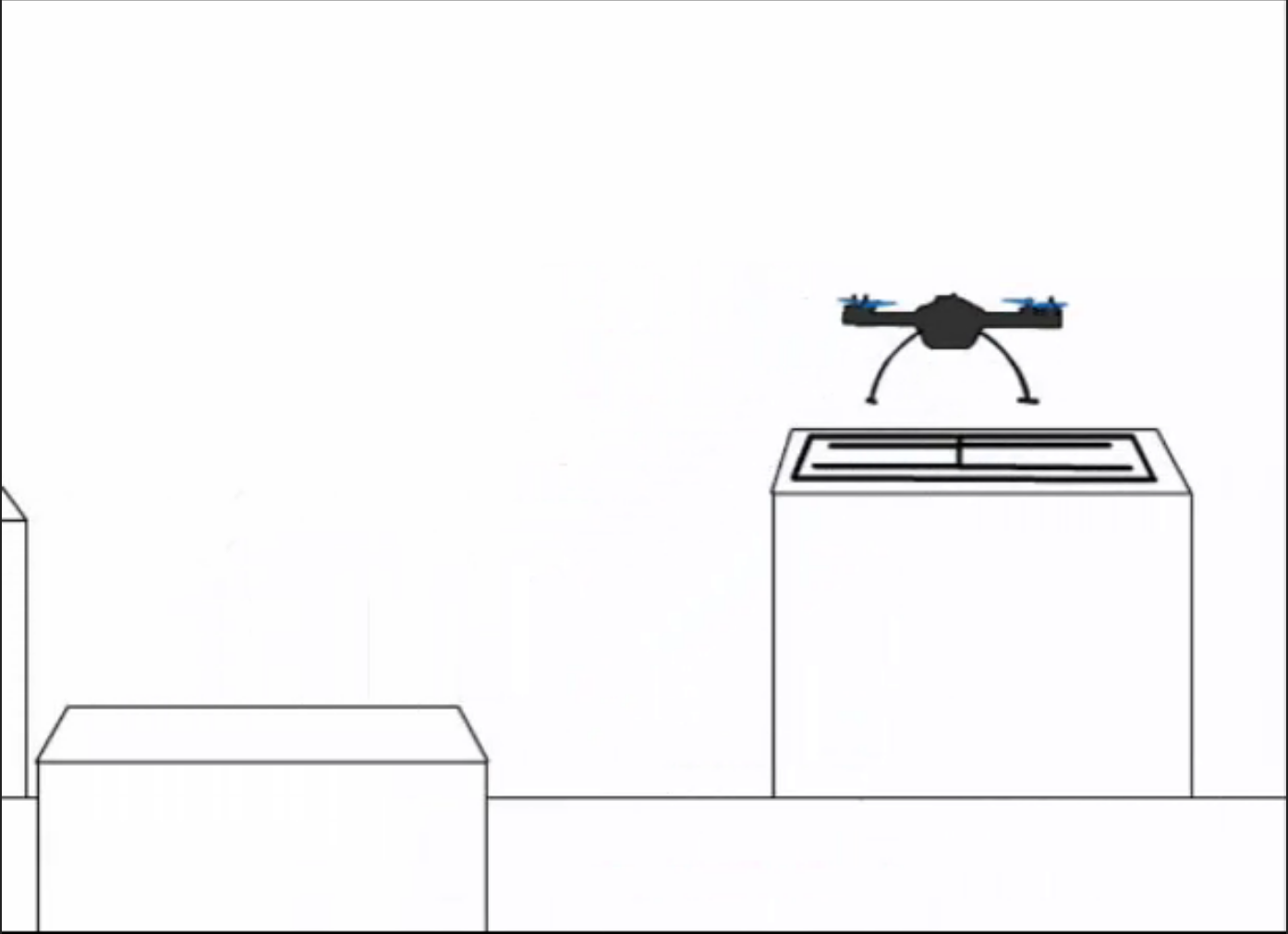
- Autonomous FLight and search the landing platform
- Autonomous Flight and follow a moving object
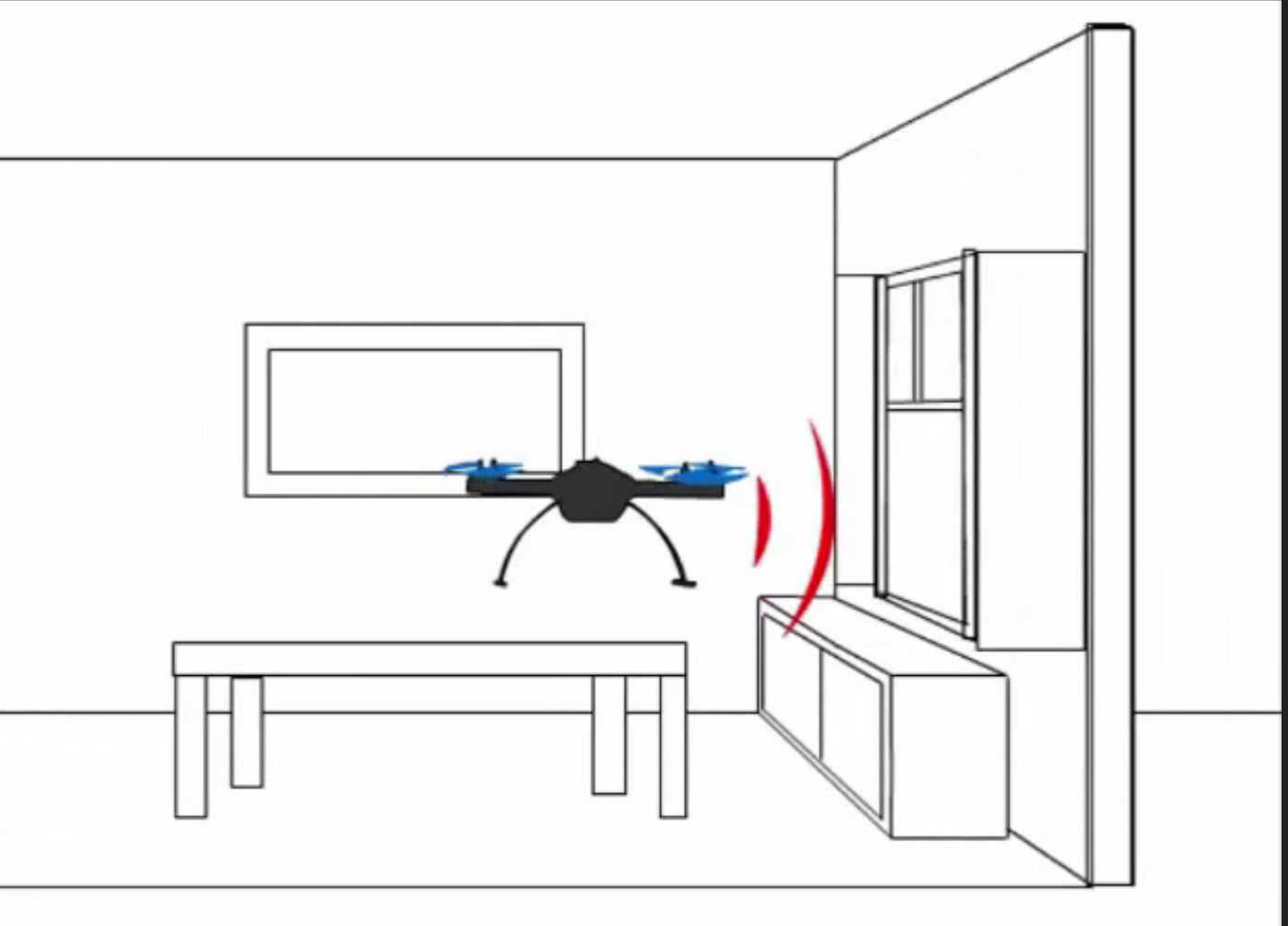
- Autonomous navigation using vision to through windows
- Autonomous Obstacle Avoidance using ORB-SLAM
- Autonomous navigation using ORB-SLAM
- Controlling a dron via a keyboard
- Demonstration of mapping and relocation
Events
- Participation in the autonomous Drone competition in the Mexican Robotics Tournament (TMR 2017)
- Demostration to media, organized by FMR
- Participation in the International Workshop on Vision and Control for Autonomous Drones
- Winter School Upaep, Puebla
- Baños de Ciencia, Cordoba, Veracruz
- SIMEVANT, México city
- 36 FILIJ 2016, Mexico city
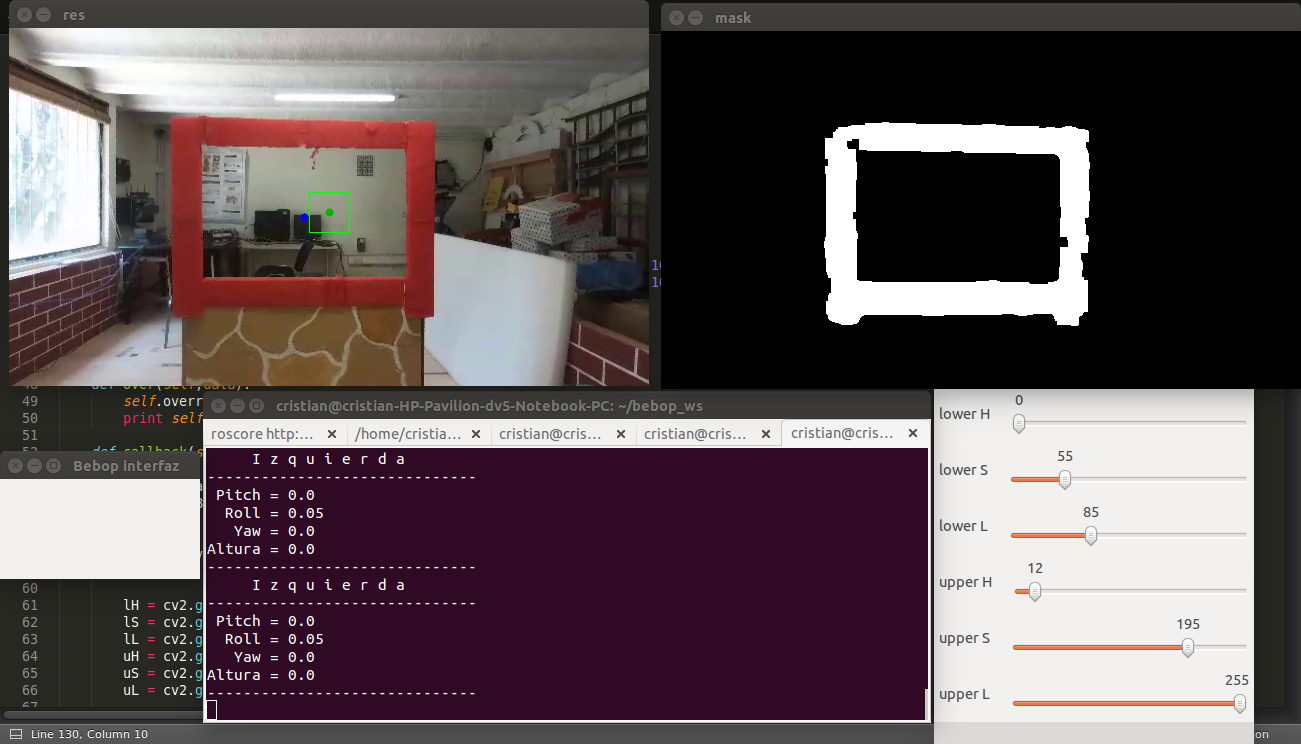 Using vision to through windows
Using vision to through windows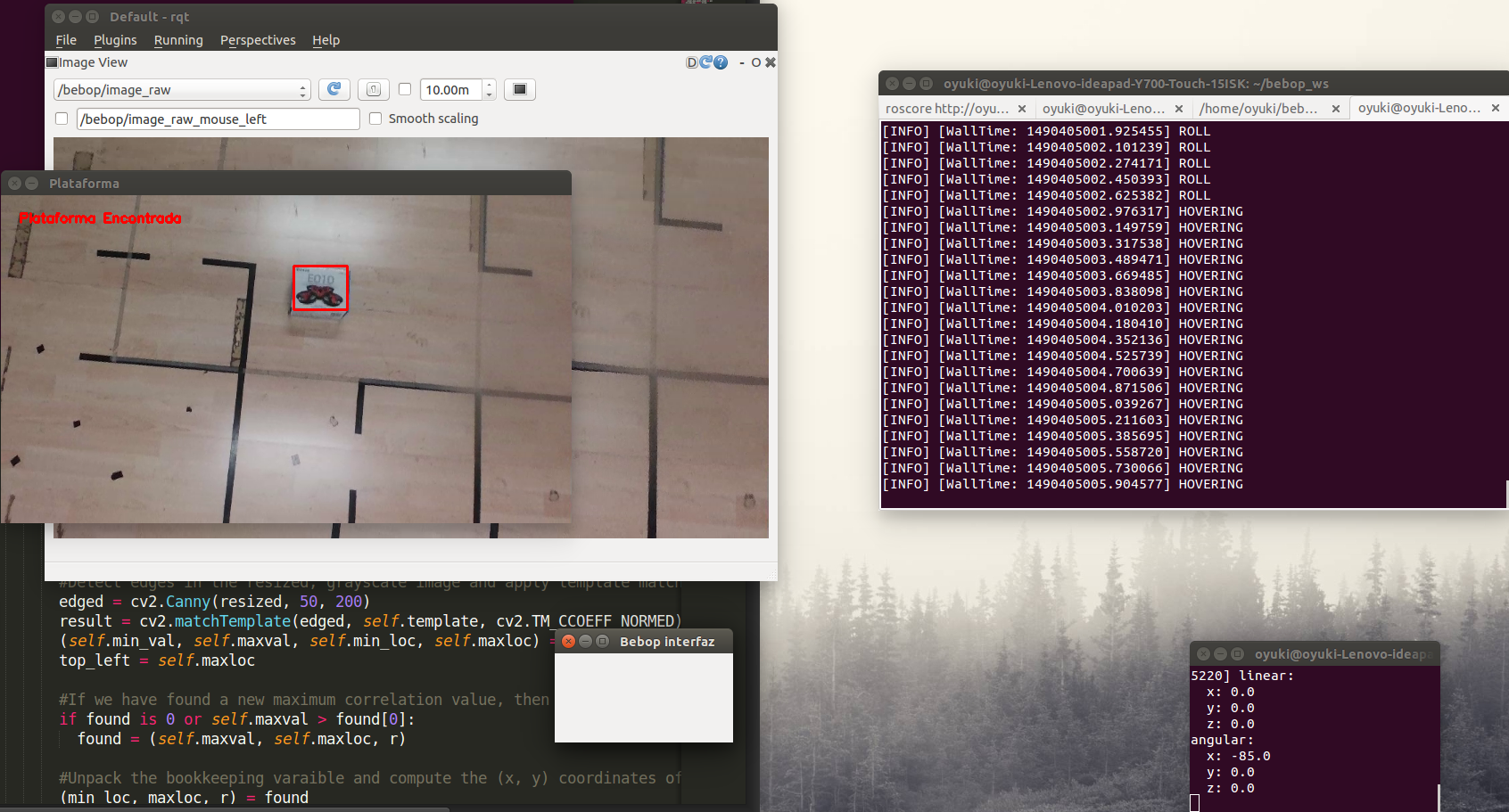 Search the landing platform
Search the landing platform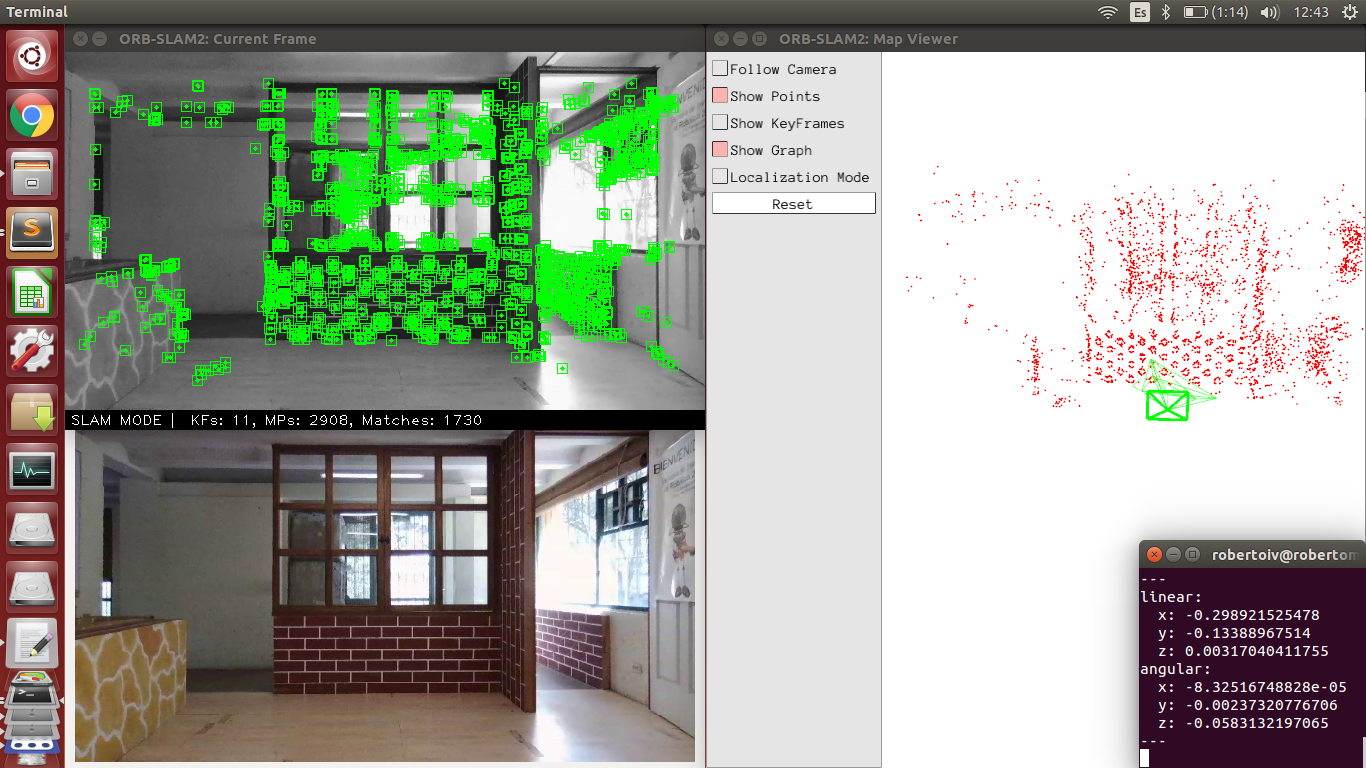 Navigation using ORB-SLAM
Navigation using ORB-SLAM International Worshop on Vision and Control for Autonomous Drones
International Worshop on Vision and Control for Autonomous Drones Demostration about drones in Baños de Ciencia, Cordoba, Veracruz
Demostration about drones in Baños de Ciencia, Cordoba, Veracruz 36 FILIJ 2016 Letras Perdidas
36 FILIJ 2016 Letras PerdidasSOME PICTURES OF THE COMPETITION (TMR 2017)
 One of our colleagues in the competition
One of our colleagues in the competition Quetzalcuauhtli Team working for the competition
Quetzalcuauhtli Team working for the competition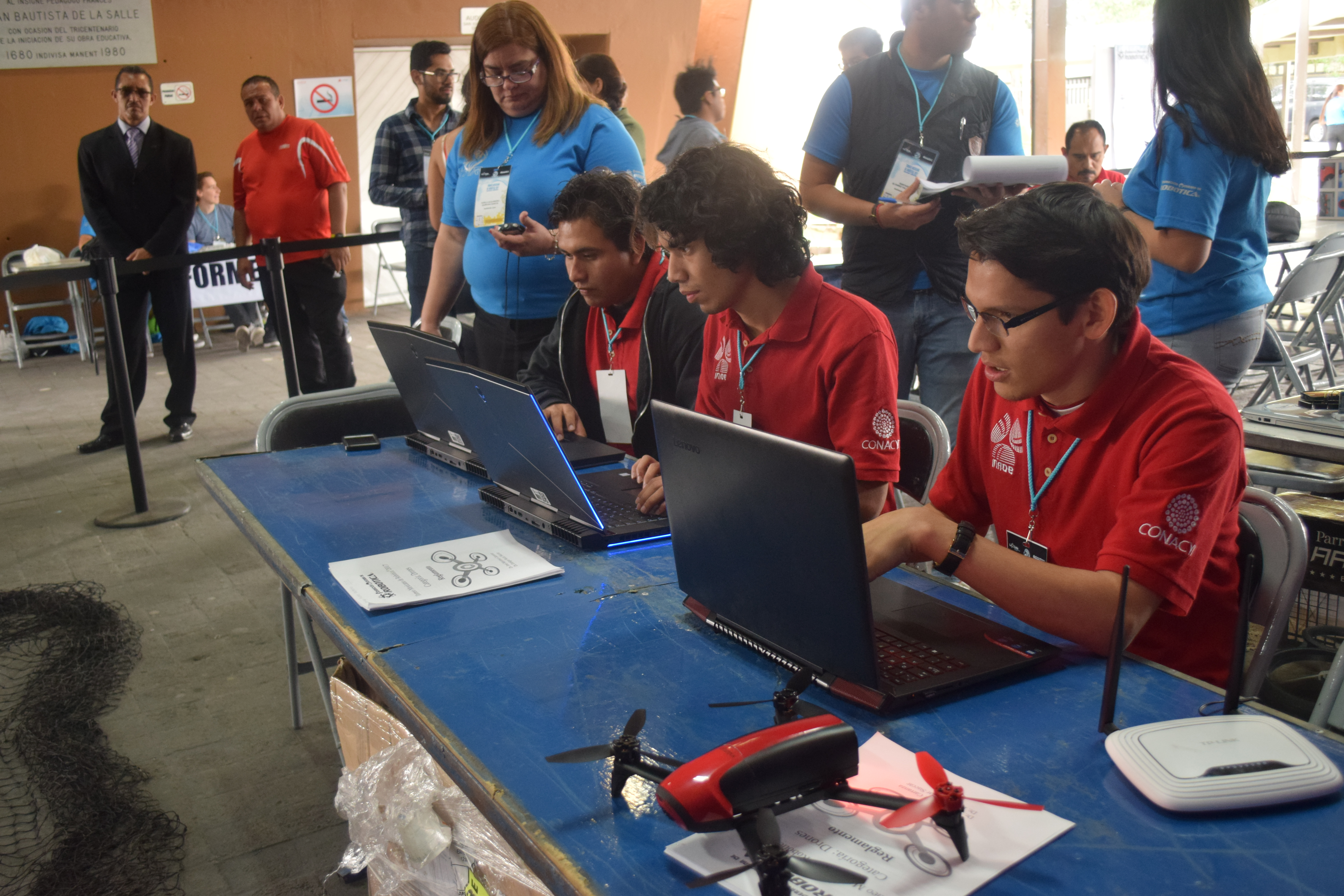 Moment of competition
Moment of competition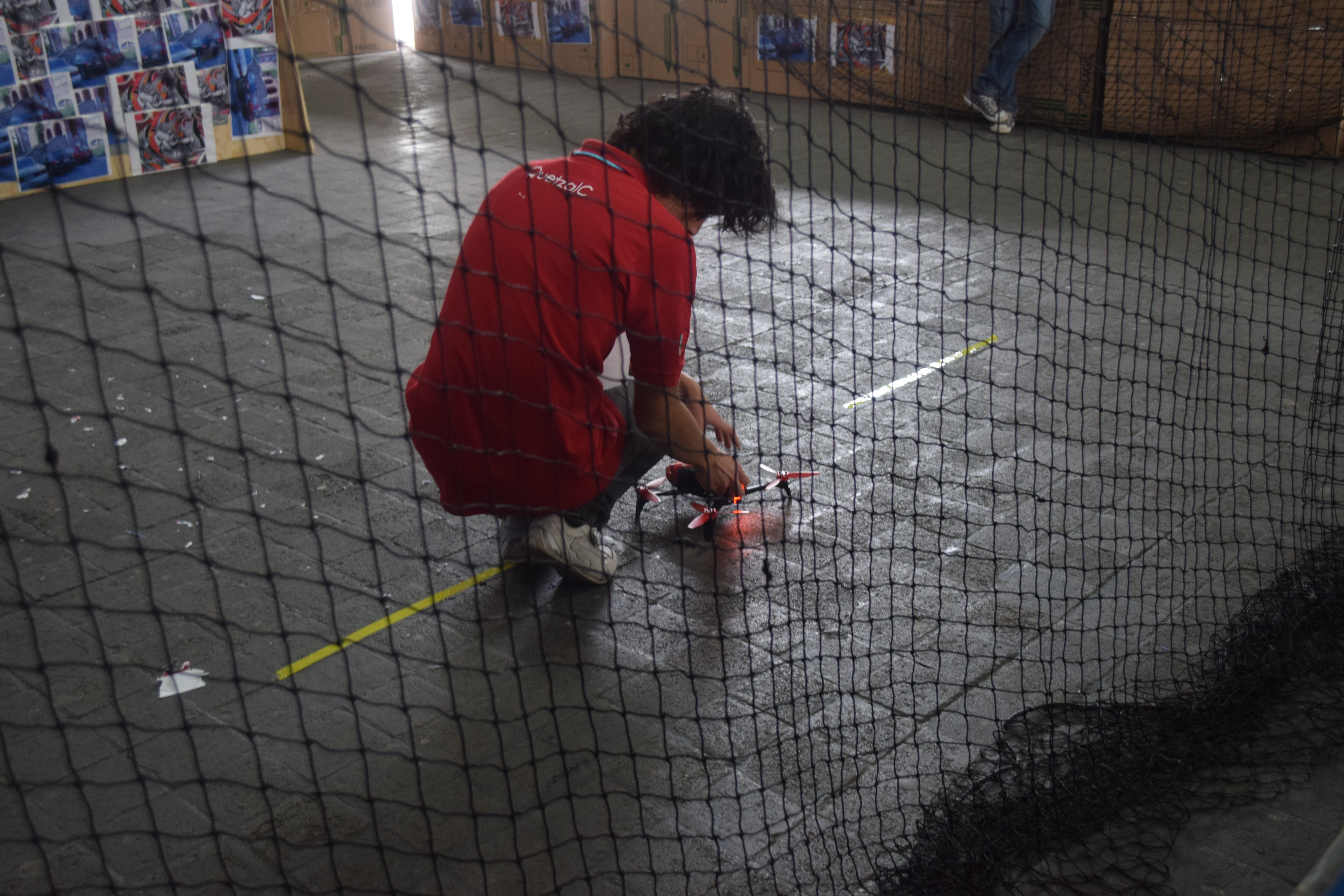 Drone Calibration
Drone CalibrationAutonomous Drones, TMR (2017)
The development of unmanned aerial vehicles, especially those with multi-rotor architecture, known popularly as drones has grown enormously in the last years. The development of autonomy for drones have aplications in various areas such as exploration and mapping of land, search and rescue operations, surveillance and even in the visual arts. In 2017, the TMR inaugurates the category of Autonomous Drones in which it is sought to promote the development of all associated technologies to this type of mobile robots.
TMR 2017 Autonomous Drones Category
 Beginners Subcategory: This category consist of the drone can fly autonomously doing five misions totally autonomous:
Beginners Subcategory: This category consist of the drone can fly autonomously doing five misions totally autonomous:
- Take off and direct flight and obstacle dectection
- Take off and direct flight, obstacle avoidance and keep on the road
- Path flight through windows
- Take off and follow a moving object
- Flight on steps
 Advanced Subcategory: This category consist of the drone can fly autonomously doing five missions totally autonomous but in this case this missions are more complex:
Advanced Subcategory: This category consist of the drone can fly autonomously doing five missions totally autonomous but in this case this missions are more complex:
- Take off and Autonomous Navigation for waypoints
- Take off and search the landing platform
- 3D Mapping
- Object transportation between two drones
- Formation Flying

For more information: TMR 2017
IMAV, October 2016
The International Micro Air Vehicle Conference and Competition 2016 (IMAV 2016) will take place in Beijing, China. The IMAV is a yearly event that combines a scientific conference with a technological competition involving Micro Air Vehicles (MAVs). Such a combination allows research groups from all over the world to share their knowledge, and stimulates them to focus on research that can be used in real life scenarios.
IMAV 2016 COMPETITION
 Outdoor Competition: equipped with multiple MAVs, the search and rescue team approaches the accident site. The team needs to perform the following missions in one or multiple trials:
Outdoor Competition: equipped with multiple MAVs, the search and rescue team approaches the accident site. The team needs to perform the following missions in one or multiple trials:
- Take off from a moving and rocking platform.
- Do a fast mapping of the accident area to evaluate the whole situation and then find designated targets, such as the location of the people in the water.
- Sample water around the oil rig and then release the water into a specified water container.
- Landing on the same moving and rocking platform.
- Etiam vel felis at lorem sed viverra.
 Indoor Competition: the team needs to enter a building in the drilling platform to move some important objects to safe locations. The main mission elements are designed as follows:
Indoor Competition: the team needs to enter a building in the drilling platform to move some important objects to safe locations. The main mission elements are designed as follows:
- Taking off from a moving platform
- Entering the building via different entrances: doorway, chimney or window.
- Pickup objects and release them to the correct locations.
- Exiting the building.
- Landing on the moving platform.
- Mapping of the indoor environments.

For more information: IMAV 2016
SOME PICTURES OF THE COMPETITION (IMAV 2016)
 Drones Registration
Drones Registration Quetzalcuauhtli Team working for the competition
Quetzalcuauhtli Team working for the competition Moment of competition
Moment of competition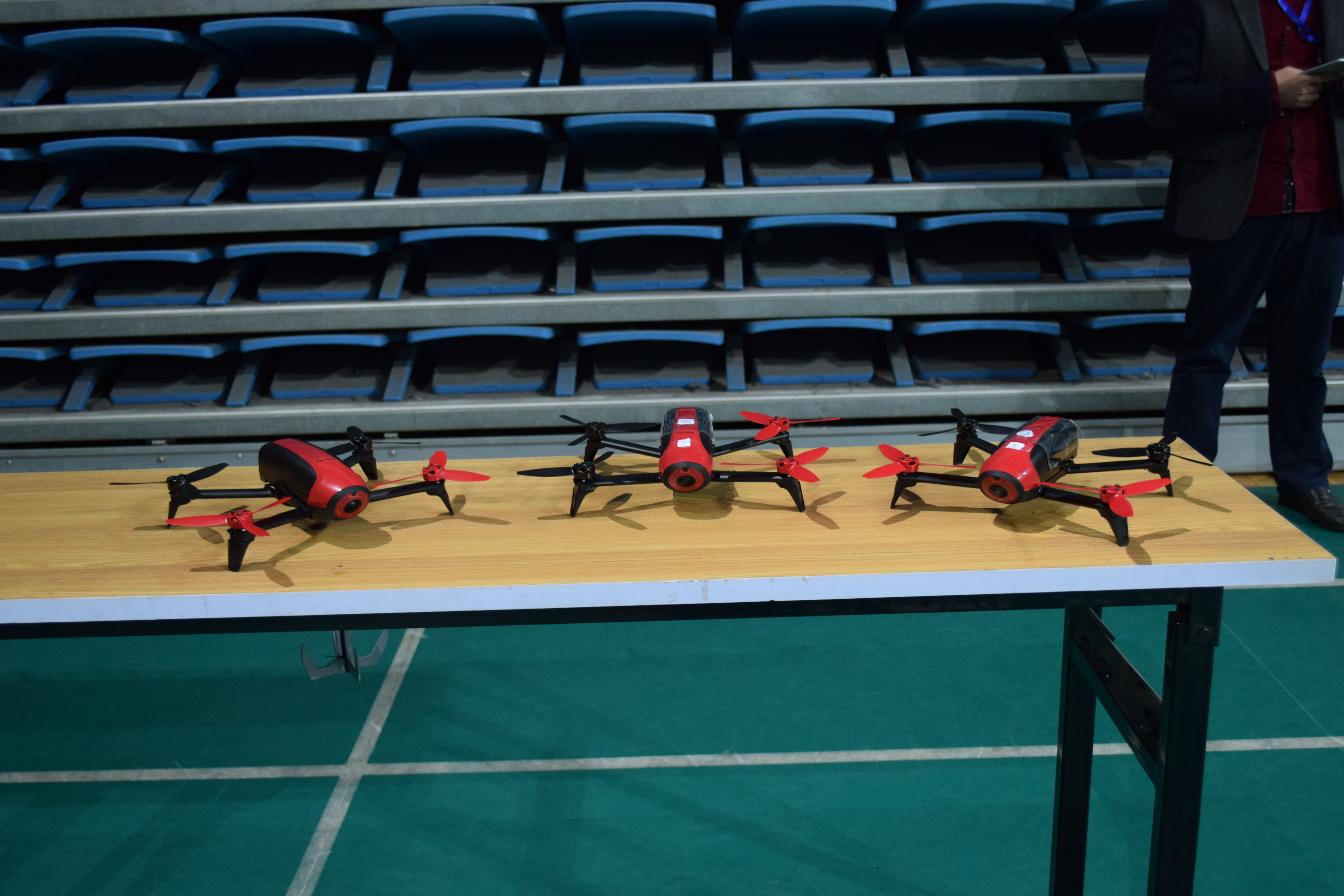 Our quetzalcuauhtlis
Our quetzalcuauhtlis